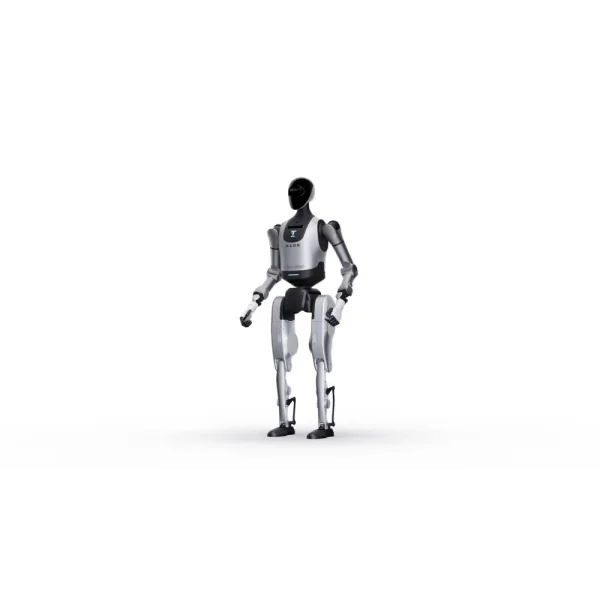







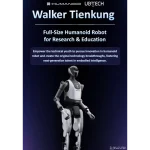
Robot Humanoïde Grandeur Nature à Intelligence Incarnée
Le Robot Humanoïde Grandeur Nature à Intelligence Incarnée est un robot humanoïde hautes performances, de taille réelle, conçu pour la recherche avancée et les applications éducatives. De conception anthropomorphique, il mesure 172 cm de haut et dispose de 42 degrés de liberté (DDL), permettant des mouvements biomimétiques complexes, comme des sprints à des vitesses allant jusqu’à 10 km/h. Son châssis léger est fabriqué en alliages d’aluminium et de titane de qualité aérospatiale, intégrant des modules d’articulation exclusifs capables de fournir un couple maximal de 300 Nm. Le robot est alimenté par deux batteries remplaçables à chaud (30 Ah + 3 Ah), offrant jusqu’à 3 heures d’autonomie en mouvement continu et 6 à 8 heures en veille, grâce à un système de refroidissement par conduits d’air sur tout le corps. Ce robot excelle en perception et interaction multimodales, grâce à des caméras de profondeur, des capteurs de force à six axes et un kit vocal IA. Son cœur de calcul intègre une carte Orin 550 TOPS, permettant le traitement en temps réel de tâches telles que la coordination œil-main, la manipulation adroite et l’interaction avec de grands modèles. Il prend en charge les interfaces ouvertes compatibles ROS2 et offre une architecture modulaire avec des composants évolutifs, notamment des bras à 7 degrés de liberté et des mains à 6 degrés de liberté Ce robot constitue une base solide pour la recherche sur l’intelligence incarnée et est idéal pour la recherche universitaire, la logistique industrielle et le secteur de la santé.
Plage de prix : 54,900.00 € à 94,900.00 € TVA inc.
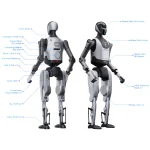
Robot Humanoïde Grandeur Nature à Intelligence Incarnée – Specifications:
- Dimensions du produit Hauteur : 172 cm, Poids net : ≈73 kg
- Matériaux de structure : alliage d’aluminium à haute résistance + alliage de titane + plastique technique
- Capacité de la batterie du système d’alimentation : 30 Ah + 3 Ah (configuration à deux cellules)
- Total DOF 42 : DOF de la jambe 7 (épaule 3, coude 1, poignet 3) × 2, DOF du bras 6 (hanche 3, genou 1, cheville 2) × 2, DOF de la tête/cou 3 DOF (module de la tête standard), DOF de la taille 1, main habile 6 DOF, main habile × 2 (standard)
- Couple maximal 300 Nm
- Modes de contrôle du moteur : force hybride-position/vitesse/position
- Contrôle de mouvement : architecture hybride traditionnelle + apprentissage par renforcement
- Autonomie : 6 h (veille), 3 h (continu)
- Caméra de profondeur : Caméra de profondeur ×3
- Carte de calcul IA : NVIDIA Jetson AGX Orin × 2 (550 TOPS)
- Intergiciel : ROS2
- Communications internes : CAN/EtherCAT
- Communications externes : Wi-Fi, Bluetooth 5.2, Ethernet
| Poids | 73 kg |
|---|---|
| Dimensions | 45 × 60 × 172 cm |
| Fonctions |
Voix et Vision ,Voix et vision + intelligence incarnée |
-
 Facturation hors taxes pour les professionnels européens si le numéro de TVA est valide.
Facturation hors taxes pour les professionnels européens si le numéro de TVA est valide.
-
Livraison sous 7 à 10 jours pour les produits en stock et 3 à 4 semaines pour les produits en rupture de stock. Livraison gratuite pour les commandes supérieures à 60 euros (sauf véhicules smart et produits lourds). Entrepôts en Espagne, Allemagne, Pologne, France, Hongrie et Grèce.
-
Nous remboursons ou échangeons tout défaut, endommagé pendant le transport ou produit non conforme. Vous avez le droit d'annuler ce contrat dans les 14 jours sans donner aucune raison. Le délai de rétractation expirera après 14 jours à compter du jour où vous acquérez, ou un tiers autre que le transporteur et indiqué par vous acquiert, la possession physique du dernier bien. Pour exercer le droit de rétractation, vous devez nous informer [NTS Systems and Trade LTD, Rakovski 157, 1000, Sofia, [email protected], +35 92 49 31064) de votre décision de résilier ce contrat par une déclaration claire (par ex. lettre envoyée par courrier, fax ou e-mail). Vous pouvez utiliser le modèle de formulaire d'annulation ci-joint, mais ce n'est pas obligatoire. Pour respecter le délai de rétractation, il vous suffit d'envoyer votre communication concernant votre exercice du droit de rétractation avant l'expiration du délai de rétractation.
Produits connexes

DIY Robot Tumbling Electrique Educatif – 3 méthodes d’Assemblée
En rupture de stock

ELP 720P IP Caméra Robotisée Rotative
En rupture de stock

Huntsky Robot de Nettoyage en Microfibre
En rupture de stock

Jeu Éducatif de Robot d’Assemblage Solaire (STEM) – Vaisseau Spatial
En rupture de stock

JXD KiB Robot d’Ιntelligence Αrtificielle à Τélécommande avec Poussette
En rupture de stock
Q2 Jeu de Robot Éducatif avec Capteur Tactile et Son
En rupture de stock

R2 Robot Intelligent à Télécommande avec Capteur de Gestes
En stock

RC Robot Intelligent avec Balance à Deux Roues
En rupture de stock